

中国航空发动机集团简介、直属单位与主营业务
2022年04年24日
机器之心 2022-05-23
这是第一次有一群无人机在自然非结构化环境中成功编队飞行,「我们向未来又迈出了一步,」研究人员写道。
在科幻电影中,我们经常看到无人机的身影,例如在《普罗米修斯》(2012)中,宇航员在决定走哪条路之前释放了几个微型机载装置来探索一艘未知的外星飞船;在《安德的游戏》(2013 年)中,无人机群包围了飞船,形成了抵御外星人攻击的盾牌,后来为人类赢得战斗扫清了道路;在《星球大战 III》(2005 年)和《银翼杀手 2049》(2017 年)中,摩天大楼之间繁忙而有序的空中交通机器人在高科技星球上也是很常见的景象。
科幻电影中机器人集群的导航和协调能力吸引并启发了来自浙江大学的研究者,在两年多的研究中,该科研团队解决了未知复杂环境下机器人单机与群体的智能导航与快速避障方法等一系列核心技术。
该团队研发的微型智能空中机器人集群可以在密集的竹林间穿梭。从展示来看,两根竹子之间的可用空间可能不到 30 厘米宽,除了茂密垂直生长的竹子外,还有其他种类的障碍物,包括倾斜的竹子、树干、低矮的灌木、杂草沟、不平整的地面等,这些机器人集群都能完美的通过:
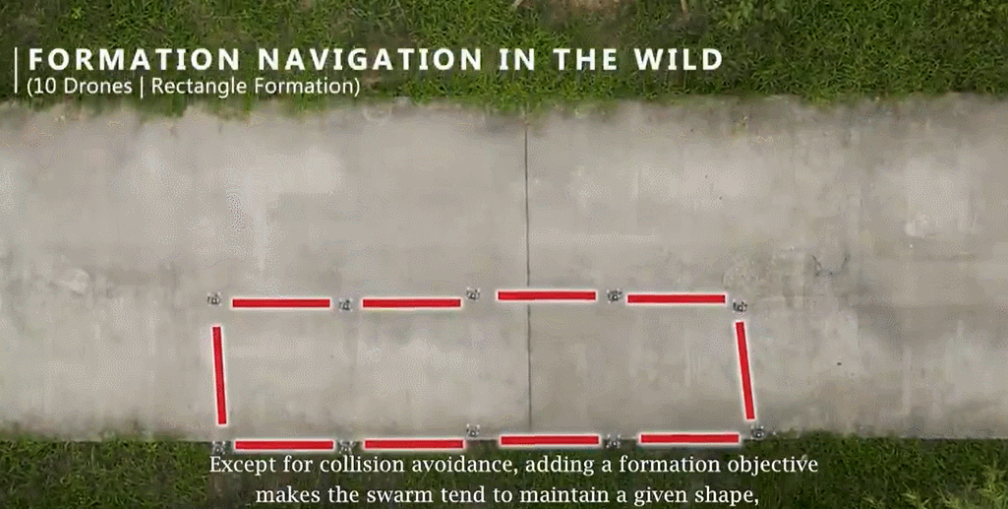
机器人可以在新地形中编队飞行,尽管有时机器人必须偏离轨迹以避开未知障碍,但之后会加速赶上编队,迅速恢复队形:
有限空间内也能随机方向飞行,临时增加障碍物、以及人类主动干扰机器人都没出现碰撞:

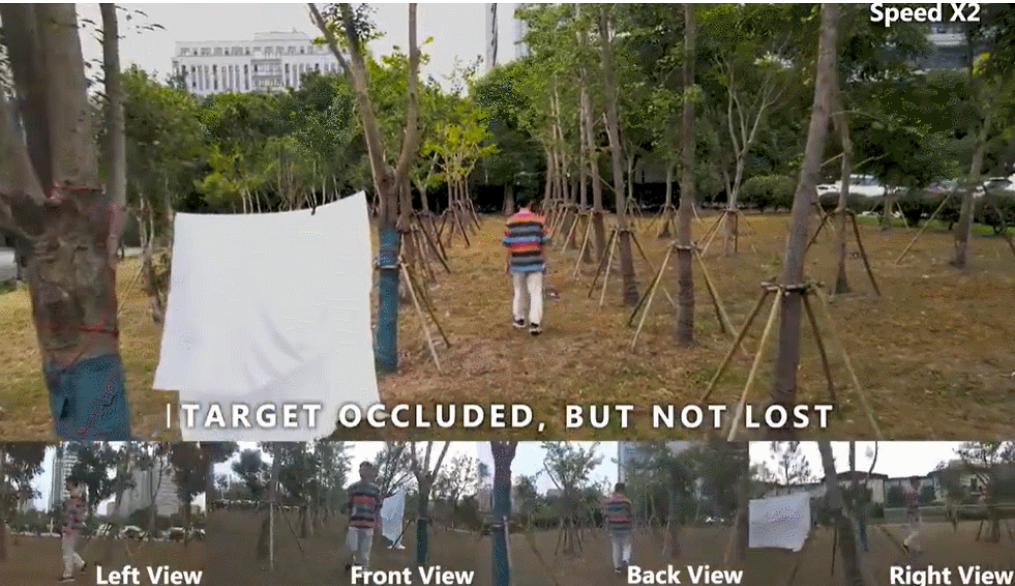
相互配合持续追踪特定目标:人类在向前移动时,不用担心机器人发生碰撞,目标也不会跟丢:
单个空中机器人只有手掌大小,重量比一听百世可乐还轻:

该研究近期登上机器人领域权威期刊《Science Robotics》最新一期的封面,论文一作为浙江大学控制科学与工程学院博士研究生周鑫,通讯作者为该院高飞博士和许超教授。
论文地址:
https://www.science.org/doi/10.1126/scirobotics.abm5954
可以穿过茂密竹林、及时避障的无人机是如何实现的?
随着计算、传感和通信领域的最新发展,四旋翼等空中机器人已经进入人类生活,这些机器人具有非凡的多功能性,可以完成众多任务,而且价格低廉。尽管单个机器人的自主导航能力在工业界和学术界得到发展,但很少有机器人集群系统能达到类似的性能。浙大团队是如何做的呢?在研究了无人机的各种应用后,他们发现 TEEM(轨迹规划、扩展性、经济计算、微型尺寸)技术的关键是轨迹规划,它不仅可以改变机器人轨迹形状,还可以调整时间分布,以最大限度地利用解空间,充分挖掘无人机的能力。在仅进行空间变形的情况下,与基准比较部分相比,无人机在通过狭窄通道时,往往会绕航等待其他无人机,这将阻碍后续无人机的飞行,导致飞行轨迹较差甚至不安全。因此,同时规划飞行轨迹的形状和时间,即时间 - 空间轨迹规划,是无人机安全高效飞行的关键。尽管如此,这种联合优化对于多旋翼飞行器来说一直是个难题,因为共同决定轨迹的空间、时间参数是高度耦合的。在本文所提出的方法中,浙大团队通过解耦目标函数计算中的空间和时间参数,实现实时空间 - 时间优化,并实现了优化变量和代表轨迹的中间变量之间的线性复杂度映射。
在轨迹规划框架下,需要达到的目标包括:多个目标,例如更短的飞行时间、更高的平滑度和接近给定路径;约束,例如避免碰撞和动态可行性。对于第一个需求,该研究在目标追踪(goal-chasing)方案下构建规划器,它不断接收用户目标并不断追逐最新目标。对于第二个和第三个要求,它们之间的非凸性使得优化问题难以解决。为了实现高兼容性,该研究采用将所有目标和约束转换为加权惩罚的约束转录(constraint transcription)方法。
具体来说,来自约束的惩罚被分配了比其他目标高几个数量级的权重。然后可以通过利用稀疏参数优化和约束转录的标准求解器快速解决轨迹规划问题。为了简化问题,该研究提供了使用预先制定的通用惩罚 (GPP) 直观地添加特定于任务的目标和约束的详细示例。GPP 包括时间最小化、平滑度最大化、避免碰撞和动态可行性。该轨迹规划框架如图 2D 所示
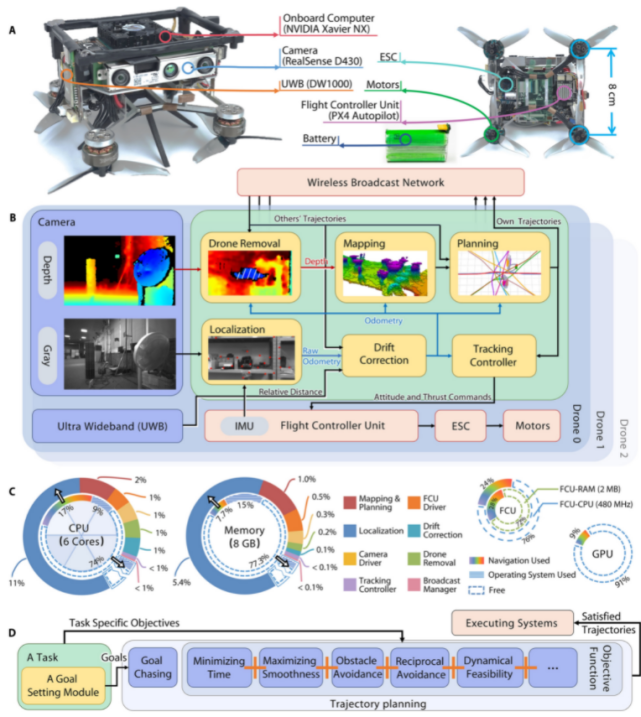
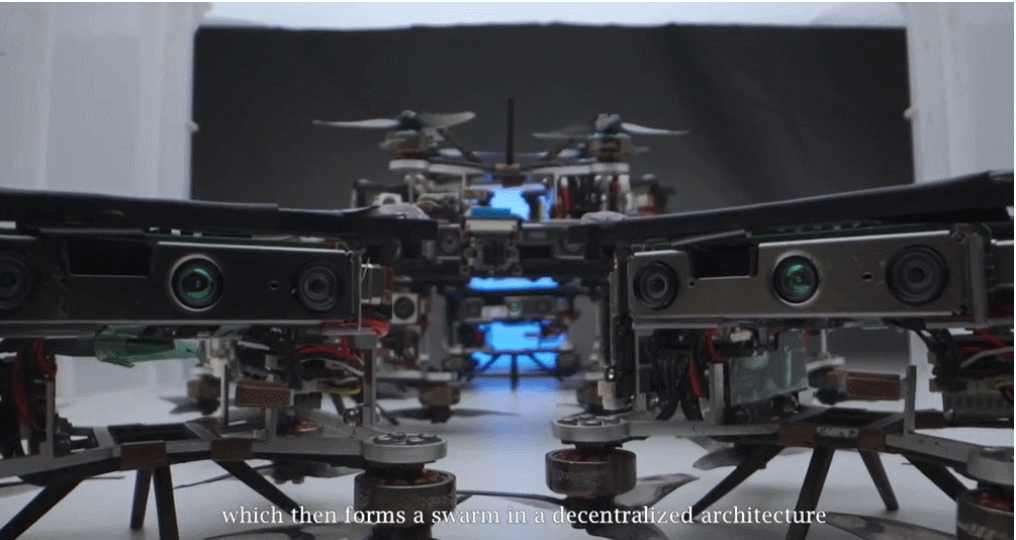
图 2:硬件和系统架构细节。
除了轨迹规划外,该研究采用在每架无人机上独立运行的视觉惯性里程计进行空中集群定位。然而,累积里程数漂移可能导致无人机在继续报告时发生碰撞,为了保持安全距离,因此该研究还开发了一种分散漂移校正(decentralized drift-correction )算法。
如图 2 (A 和 B) 所示,每架无人机都配备了完整的感知、定位、规划和控制功能,并通过广播网共享轨迹松耦合。巧合但合理的是,本文所提出的系统类似于鸟类在森林中自由飞行,同时还能避开障碍物和其他移动的生物。例如,在近程导航中,鸟类主要依靠眼睛和前庭系统,相应地,该研究开发并改进了视觉 - 惯性测距能力。
此外,鸟类可以同时调整路径和速度以避免碰撞,并且同时权衡飞行时间和平滑度以节省能量,基于此,该研究提出了多目标空间 - 时间轨迹联合优化策略。除了受鸟类启发外,该研究还充分利用了电动人工系统的优势。此外,该研究解决方案自然地满足了关于个体和群体智能的分散协调,从而提高了鲁棒性。
研究人员表示,未来这种小型集群机器人可用于火灾等搜救场景中,还可用于地形勘探等任务。

2022年04年24日

2022年04年20日

2023年03年18日

2019年12年07日

2019年12年13日

2019年12年11日

2022年08年01日

2019年10年05日

2019年12年12日

2022年04年12日



评论 (0)